


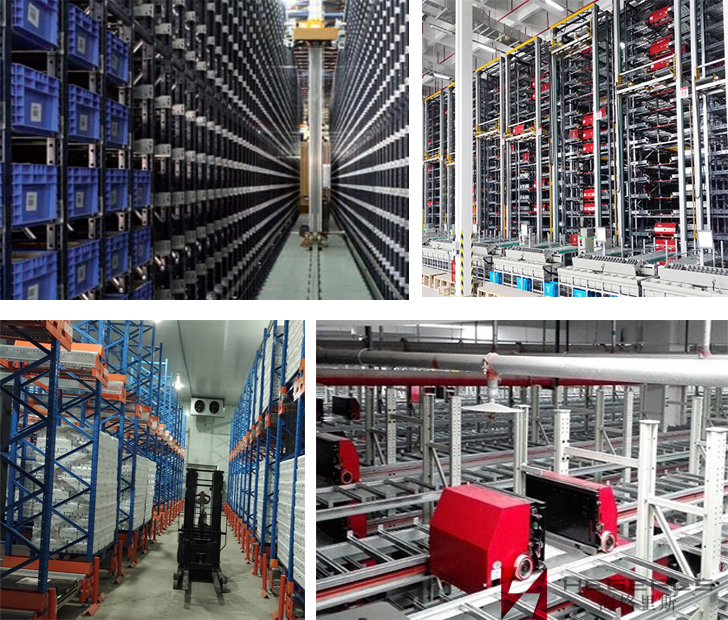
Di van salên dawî de, digel populerbûna domdar a Înternetê, e-bazirganî bi lez pêşket. Berhemên fermanê yên xerîdar taybetmendiyên gelek cûrbecûr, hindik beşan û heyama radestkirina kurt destnîşan dikin, ku ev dihêle ku dendika hilanînê ya li navenda belavkirina lojîstîk a dabînkerê bi domdarî baştir bibe. Rêjeya malzemeyên ketin û derketina depoyê zêde dibe. Hejmara hilgirtina parçeyên piçûk roj bi roj zêde dibe. Zêdetir û bêtir navendên belavkirina lojîstîkê ji pergala hilgirtina mirovan re malikên bingehîn ên gerîdeyê bikar tînin.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
Çermên teleskopîk ên kelandinê bi berfirehî di alavên hilanîna otomatîkî de, yên wekî embarên stereo yên gerokê yên pir-qatî, benzeyên cûrbecûr AGV, RGV, û barkirina piçûk têne bikar anîn. Giraniya herî zêde ya qutiya materyalê ya ku HEGERLS digire dikare bigihîje 50 Kg. Berfirehiya girtina milê forkê dikare bi kêfî di nav rêza 200 ~ 600 mm de were sererast kirin. Rêwîtiya herî zêde 840 mm e. Leza xebitandinê ya herî zêde ya forka teleskopî 1.5 m/s e, û lezbûn 1.2 m/s² ye. Dengê xebitandinê di nav 75dB de tê kontrol kirin, ku dikare hewcedariyên pir refikên dirêjkirina yek û ducarî bicîh bîne. HEGERLS di heman demê de dikare embara stereoskopî ya gerîdeya gerokê ya pir-qatî ya qutiya çengê teleskopîkî ya girtî li gorî hewcedariyên taybetî yên xerîdar, wek firehiya girtinê, lêdana hilanînê û pîvanên din, xweş bike.
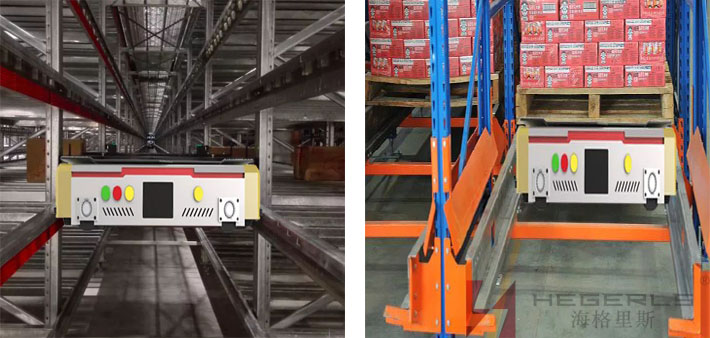
Parçeyên di qutiya çeleqeya teleskopîk a pir-qatî ya Hiygris HEGERLS de embara stereo ya gerokê ya gerokê ya Hiygris HEGERLS mekanîzmayek teleskopî ye ku di depoya stereo û pergala hilanîna otomatîkî ya lojîstîkê de ji bo hilanîn an veguheztinê tê bikar anîn. Ew fonksiyona berfirehkirina otomatîkî ya du-alî ya maqûl û fonksiyona sînorê rastîn heye! Ew dikare rasterast li ser stakerê were çikandin, an li ser mekanîzmayek hilgirtinê ya sabît, an li ser platformek hilgirtina mobîl were danîn. Stacker di rêça di navbera refikan de diherike da ku bixweber bigihîje an veguheztina tiştan! Ew dikare bi pergala xeta hilberînê û pergala rêveberiya pargîdaniyê ve were girêdan. Ew teknolojiya komputer û barcode (encoder) bikar tîne da ku agahdariya rêveberiya hişmend û xebitandinê nas bike!

Der barê HEGERLS Clamping Telescopic Fork
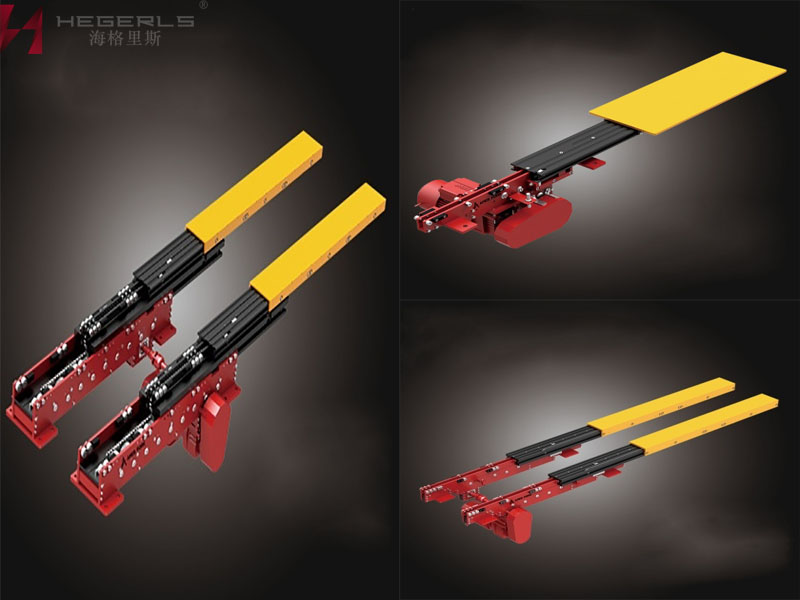
Çûna girtina teleskopî ya HEGERLS cureyek yekta ya çeqilmastê ye di rêza çiqilên teleskopî yên stakeran de, bi navî, çeqilmasteke otomatîkî ya teleskopî ya du-alî, ku jê re jî tê zanîn çeqilmastekî hilgirtinê an jî çengek girêkê ya hilgirtinê, çeqilmastekê an çeqilmastekê. . Ew çengek e ku bi taybetî ji bo veguheztina qulikên piçûk tê bikar anîn. Ew dikare rasterast li ser AGV-yek hilbijartî ya pir-qatî an platformên din ên xebatê, bi berfirehkirina milê çeqilmastê û kilama lepê (çengê) were civandin, Çalakiya gihîştin an veguheztinê temam bike!
Pîrêka gripperê HEGERLS bi piranî ji alema aluminiumê hatî çêkirin, xwedan mezinahiya piçûk, giraniya sivik, leza bilez a xebitandinê û berfirehbûna nerm e. Di heman demê de, ew di heman demê de prensîba hevdengkirina pir motorê jî dipejirîne, fêhm dike ku heman mekanîzmaya qulika teleskopî dikare ji bo veguheztin an gihîştina qutiyên taybetmendiyên cihêreng were bikar anîn. Ew ne tenê bi bandor kargêriya hilanînê çêtir dike, lê di heman demê de rêjeya karanîna cîhê hilanînê jî pir çêtir dike, nemaze ji bo depokirina Aqilmend a zirav!
Klîba HEGERLS li ser avahiya qalika teleskopî
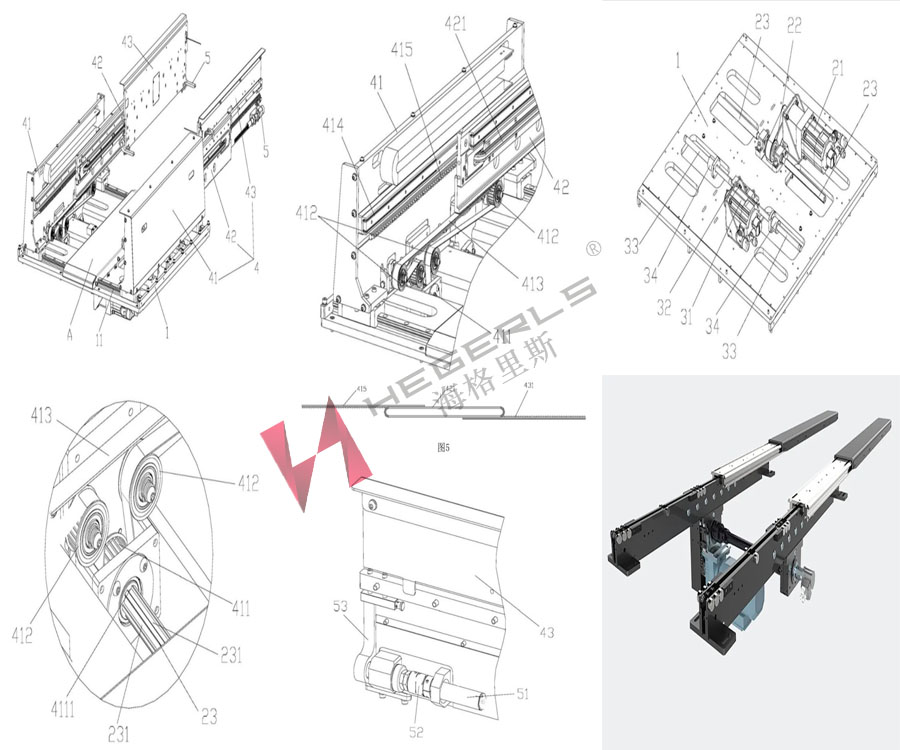
Struktura HEGERLS gripper fork dikare li cîhê hilanîna kûr û cîhê hilanînê ya kûr were dabeş kirin. Cihê depokirina kûr cîhek hilanînê ye ku bi du qutiyên maddî ve tê, û cîhek hilanînê ya nezîkî cîhek hilanînek bi yek qutiyek materyalê ye. Ango, cîhek hilanînek kûr dikare du qutiyên materyalê di yek carê de girêbide, dema ku cîhek hilanînek hûrik dikare di carekê de tenê qutiyek materyalê bişkîne. Cûdahiya di navbera çengê grîpê HEGERLS û çelenga teleskopî ya duplex a asayî ev e ku çengê kişandina tilikê hîn jî ji sê laşên çengê pêk tê, ango, laşê çengê hundur, laşê çiqila navîn û laşê çiqila derveyî, ji bilî ku laşê çengê pêşîn. xwedan çîçekek din a kişandinê (çengê) ye, ku bi rêça rêber (rêya slide), barika gerokê, çerxa hevdem, kembera hevdem, barika herikbar, çîçeka veguheztinê (çengê), mîlî veguheztinê, barika çerxê, motora ajotinê (servo) heye. , motora rodê ya guheztinê Amûra vedîtinê û hêmanên din mekanîzmayek teleskopî ya bêkêmasî pêk tîne, ku bi milê çengê teleskopîk û kilama lewê (çengê) re hevkariyê dike da ku çalakiya gihîştinê an veguheztinê biqedîne!
Prensîba xebatê ya klîba HEGERLS li ser forka teleskopîk
Destê çengê ya çenga girtina HEGERLS li kêlekê ye û ji alîkî ve bi rêça rêber ve girêdayî ye. Bi kontrolê re, rêça rêber dikare bi paş û paş ve bizivire da ku dûrahiya di navbera her du milên qalikê yên forkê de rast bike, da ku bigihîje karanîna hevpar a forkê ji bo qutiyên materyalê yên pir taybetmendiyê! Dema ku malzemeyan hildide, çeqilmast berbi pozîsyona hilanîna materyalê dirêj dibe, çengela ragirtinê (lever) bixweber rûyê dawiya karton an qutiya plastîk dadikeve û bloke dike, û dûv re çeleng vedikişe, karton an qutiya plastîk ber bi nîvê qalik, û dûv re li gorî hewcedariyên derecê berevajî derdikeve, çengelê (lever) paş ve tê kişandin, û qalik dîsa vedikişe da ku karê hilgirtin an veguheztinê biqedîne! Her çend prensîba qalika gripperê wekî ya forca teleskopî ya asayî ye jî, beşên veguheztinê, girêkên girêdanê û pêkhateyên din ên forca tilikê pir cûda ne. Ji bo danasînê tê bikar anîn ku çerxa zincîrê, zincîra, gemar, raft, hwd. hemî bi çerxên hevdem, kemberên hevdem, hwd têne guheztin, dema ku milê şûştin rêyên rêber bikar tîne, û materyalên laşê çengê hemî bi pelên metal têne guheztin. an jî malzemeyên aligirê aluminiumê, ji ber vê yekê giraniya qalika gripper tenê bi qasî 80 kg e.
Digel vê yekê, divê were zanîn ku di dema sêwirana forca teleskopîkî ya tîpa gripper de, divê mezinahiya refên hilanînê yên hişk, pozîsyona vertîkal a refên bi sindoqan, asta rê û mezinahiya qutiyan were berhev kirin da ku Parametreyên giştî yên çiqilên dirêjkirinê (tevgera qalikê dirêjkirinê, cîhê qutikê, firehiya qalikê, firehiya hundurê qalikê, bilindahiya qalikê, hwd.), da ku hewcedariyên konteynerên li ser refikan bicîh bîne. Kevirê girêk tenê dikare hilberên ku di karton an qutiyên plastîk de hatine pakkirin bi bandor veguhezîne an bigihîje, û nikare materyalên nerêkûpêk veguhezîne. Digel vê yekê, pêdivî ye ku hêjmar û giraniya qutiya materyalê ya ku hatî veguheztin pir mezin nebe, û giraniya barkirinê divê ji 100KG derbas nebe! Bilindahiya qalika kelandinê bi gelemperî li gorî bilindahiya qulikê hatî sêwirandin!
Der barê HEGERLS Klîpa li ser Shuttle
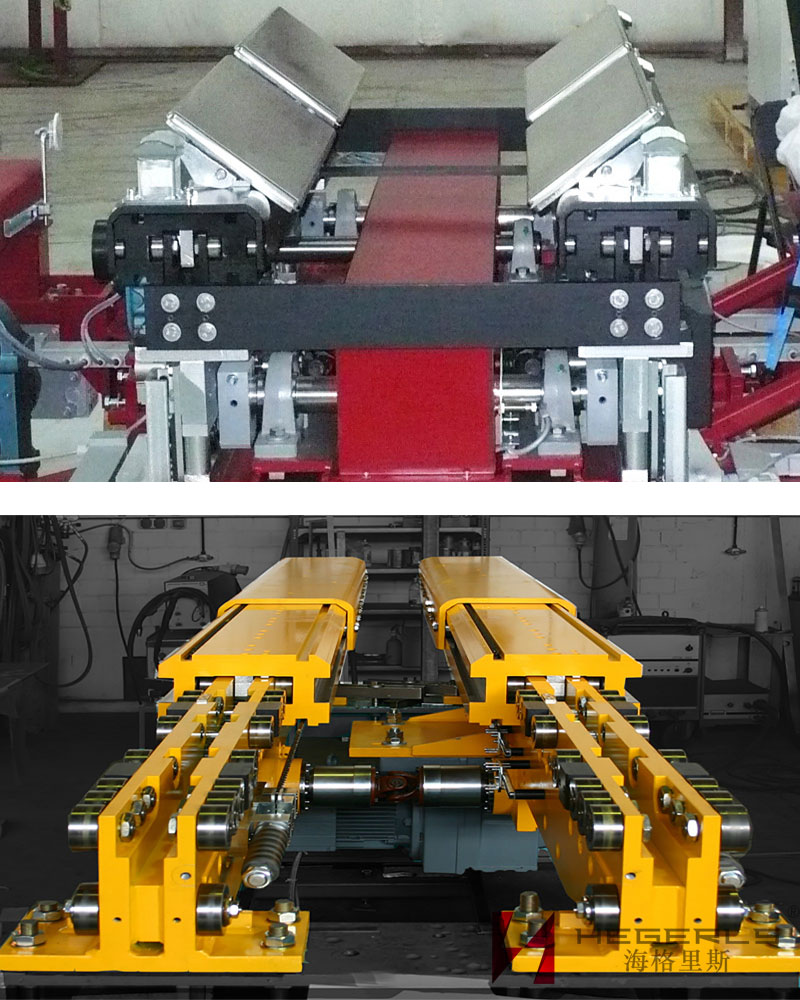
Struktura klîpa HEGERLS ya li ser gemiyê ji çarçoweya gerokê, şûşeya gerokê, mekanîzmaya rêwîtiyê, mekanîzmaya dirêjkirina forca duyemîn, kolektor, plakaya hilgir û platforma hilgirtinê pêk tê. Avahî wiha ye:
Her çarçoveyek gerokê bi gelemperî valahiyek girtî ye ku ji du aliyên laşê sereke yên li ser her du aliyan, şêl û bendika navmalê ya hundurîn pêk tê, û bi rêzê ve li her du dawiya şasiya gerokê hatî saz kirin; Şel bi qapaxa jorîn ve tê peyda kirin ku dikare bi navgînek derî ya zivirî ve were vekirin û girtin; Refikek têl a panelê li jor bendika hubê hatiye sazkirin; Mekanîzmaya rêwîtiyê ji çerxa ajotinê, çerxek pasîf, motorek bê firçeya DC, kêmker û mîlîkek girêdanê pêk tê; Her du aliyên çarçoweya gemiyê li yek dawiya şaseya gerokê bi çerxên ajotinê ve girêdayî bi şemalên girêdanê ve têne peyda kirin, û her du aliyên çarçoweya gerokê li dawiya din a şaseya gerokê bi çerxên pasîf ve têne peyda kirin ku ji hêla şaftên girêdanê ve têne girêdan; Motora bê firçe DC bi kêmker re hevkariyê dike ku çerxa ajotinê dimeşîne û çerxa pasîf dimeşîne; Şafta girêdanê bi şîfreyek magnetîkî ve tête peyda kirin, ku bi navgîniya wê pozîsyonên destpêk û rawestanê yên gemiyê li ser riya rast têne peyda kirin; Mekanîzmayek dirêjkirina çengê ya duyemîn bi rengek sîmetrîk li aliyê hundurê çarçoweya gerîdeya gerokê hatî saz kirin; Şaseya gerokê ya di navbera mekanîzmayên dirêjkirina qalika duyemîn de ji bo danîna selika barkirinê bi platformek hilgirtinê tê peyda kirin; Xala girtî ya çarçoweya gerîdeya gerokê bi rêzê ve bi plakaya hilgirtinê ve tê peyda kirin, ku li ser wê plakaya ajotinê, plakaya kontrolê ya sereke ya mekanîzmaya rêwîtiyê û plakaya kontrolê ya sereke ya mekanîzmaya dirêjkirina forkê li dû hev têne rêz kirin; Tabloya ajotinê mekanîzmaya rêwîtiyê dimeşîne da ku gemiyê li ser riya rast bimeşîne. Tabloya kontrolê ya sereke ya mekanîzmaya rêwîtiyê pîvanên xebitandinê û pozîsyonên rawestandina destpêkirina gerokê kontrol dike, û panela kontrolê ya sereke ya mekanîzmaya dirêjkirina forkê mekanîzmaya dirêjkirina forkê ya duyemîn kontrol dike da ku selikê li ser refê bigire û bi cîh bike; Amûrek berhevkirinê di navbera gerîdeya gerokê û rêça rast de, ku bi têla elektrîkî ya ku di hundurê rêça rast de hatî saz kirin ve girêdayî ye û ji bo peydakirina hêzê ji bo gerîdeya gerokê tê bikar anîn. Taybetmendiya avahîsaziyê ya klîpa li ser gerîdeya aqilmend a ji bo hilanînê jî di wê de ye ku zozan li cihên ku çerxa ajotinê û çerxa pasîf bi rêzê bi mîla girêdanê re têkilî daynin, têne danîn, û zengilek xwerû ya elastîk di hêlînê de tê danîn da ku aksial çêbike. pozîsyona çerxa ajotinê û çerxa pasîf. Tekerên rêber ên dualî bi rêzê ve li kêleka şaseya gerokê di binê çerxa ajotinê û çerxa pasîf de, û di navbera rêça rasterast û şaseya gerokê de têne danîn. Dema ku çerxa ajotinê û çerxa pasîf li ser riya rast dimeşin, çerxên rêberiya dualî sînorên çep û rastê pêk tînin. Mekanîzmaya dirêjkirina forkê ya duyemîn di nav xwe de vedihewîne: plakaya pêvekirina dirêjkirina forkê ya asta yekem, plakaya dirêjkirina qalikê ya asta duyemîn, mekanîzmaya pêlika hevdem a asta duyemîn, mekanîzmaya ajokera dirêjkirina çiqilê asta duyemîn, motora ajokera dirêjkirina forkê, kêmkerek din, û mîlê ajotinê. ; Aliyê derve yê stûna hubê ya çarçoweya gerîdeya gerokê bi plakaya pêvekirina dirêjkirina qonaxê ya yekem tê peyda kirin; Çîçek bi teşe U-yê di nîvê plakaya pêçandina çengê ya qonaxa yekem de hatîye rêz kirin, û çend çîpên şiklê U-yê bi navberên wekhev di qulika U-yê de têne rêz kirin; Plateka çengê ya duyemîn li dervayê çîçeka bi teşeya U-yê hatî saz kirin; Pelga çengê ya duyemîn bi çend kulpên xêzikên U-yê bi kulm û gwîzan ve girêdayî ye; Dawiyên jorîn ên plakaya dirêjkirina qaçaxa duyemîn, bi rêzê, bi çîpek veguheztinê, motorek kêmkera gerstêrkek DC û senzorek fotoelektrîkî ji derve ber bi hundur ve têne peyda kirin; Sensora fotoelektrîkî ji bo bidestxistina sînyala pozîsyonê ya forkê û şandina wê ji panela kontrolê ya sereke ya mekanîzmaya dirêjkirina forkê re tê bikar anîn, ku motora kêmkerê gerestêrka DC-yê kontrol dike da ku forkê ber bi horizontî an verastî ve bimeşe; Mekanîzmayek paşîn a hevdem a duyemîn bi rêzê ve li ser plakaya pêçandina çengê ya bingehîn û rasterast li jêr û jor çîçeka bi şeklê U-yê hatî saz kirin; Mekanîzmaya paşîn a hevdem a duyemîn bi plakaya pêçandina kembera hevdem a li ser plakaya dirêjkirina forka duyemîn ve girêdayî ye; Motora ajokera dirêjkirina çiqilê û kêmkerek din mekanîzmaya ajokera dirêjkirina çiqilê ya duyemîn ber bi tevgerê dimeşîne, û mekanîzmaya ajokera dirêjkirina çiqilê ya duyemîn ji alîyê din ve dihejîne da ku di nav mîlê ajotinê de bigere, ji ber vê yekê plakaya pêçkirina dirêjkirina çiqilê ya bingehîn tevdigere û ya duyemîn dimeşîne. mekanîzmaya pêlika hevdem a ku dimeşe, bi vî rengî plakaya dirêjkirina forca duyemîn ber bi tevgerê ve dimeşîne. Mekanîzmaya veguheztina dirêjkirina forkê ya du qonax ji şîfrekerek magnetîkî, pêleka kemberê ya hevdem I, kemberek hevdem I, amûrek çerxa tansiyonê û refikek pêk tê; Kemberek kembera demdirêj 1 û kemberek demjimar 1 li binê plakaya pêçandina çengê ya qonaxa yekem hatine rêz kirin; Yek aliyek ji palika kembera hevdem I bi mîlê veguheztinê ve girêdayî ye, û aliyek din bi mîla derencamê ya kêmkerê din re bi riya keywayê ve girêdayî ye. Amûrên çerxa tansiyonê bi rêzê li her du aliyên kêmkerê din têne danîn ji bo rastkirina alîkar a palika kembera hevdem I û kembera hevdem I; Refikek di navbera plakaya pêçandina çengê ya qonaxa yekem û kembera hevdem de hatî saz kirin; Motora ajokera dirêjkirina forkê û kêmkerek din pîvaza kembera hevdem I û kembera hevdem I dizivirînin, û kembera kembera hevdem II II û kembera hevdem II li aliyê din digerînin da ku di nav mîlî veguheztinê de bizivirin. Di heman demê de, refikên li her du aliyan pêlava pêvekirina dirêjkirina forca bingehîn a têkildar dişoxilînin da ku bigihîjin dirêjkirina forca bingehîn. Gava ku mekanîzmaya paşîna kembera hevdem a duyemîn bi hevdemî dimeşe û plakaya dirêjkirina çiqila duyemîn ber bi tevgerê ve dimeşîne, paçika bi şeklê U-yê di qulika bi teşeya U-yê de dizivire, Pelqa dirêjkirina qalikê ya duyemîn bike ku dirêjkirina forca duyemîn fam bike. Amûra çerxa tansiyonê ev e: kulm, stûna verastkirinê, gwîza ducar û çerxa tansiyonê; Tekerek tansiyonê li binê kembera hevdem I û li ser her du aliyên kêmkerê din hatîye rêz kirin, û bi navgînek ducarî li ser stûna laşê sereke tê sabît kirin; Di bin gwîza ducarî de di nav pêlê de çîçekek verastker tê rêz kirin, û pozîsyona çengê birêkûpêk ji hêla pêlavê ve tê rêve kirin, ji ber vê yekê çîçeka verastker gwîza ducar ber bi jor û jêr ve digerîne, da ku kembera hevdemî ku ez bikaribim biparêzim. rewşa tansiyonê di bin çalakiya çerxa tengezariyê de.
Dê pargîdaniya ajotina otobusê ya HEGERLS çawa sûd werbigire?
Pêşîn, mekanîzmaya rêwîtiyê, mekanîzmaya dirêjkirina qalikê û çarçowe, xeta pêwendiya birêkûpêk û amûra berhevkirina hêzê ya gerîdeya hişmend a HEGERLS ya ku li ser hilanînê ye bi maqûl têne saz kirin, ku bi tevahî cîhê gerîdeya gerokê bikar tîne, û dikare li gorî hilanîn û hilanîna otomatîkî ya kelûpelên taybetmendî û cîhên cihêreng di depoya sê-alî de, berfirehkirina serîlêdana gerîdeya gerokê, û zû û bi bandor rêzek tevgerên domdar ên gerîdeyê, wek rêveçûn, dirêjkirina qalikan, hilgirtin hilanîn û danîna tiştan, Ew hilanîna bilez û rast a tiştan fam dike, bi vî rengî karbidestiya xebitandinê û asta teknolojiya otomatîkî ya depoya otomatîkî pir baştir dike, û lêçûnên veberhênanê yên pargîdaniyan kêm dike. Di heman demê de, ew di strukturê de hêsan û sivik e, di pêbaweriya bilind de, û domandina wê hêsan e. Ew dikare li şûna stakera rê ya kevneşopî biguhezîne, nermbûna pergalê fam bike, û li gorî meyla pêşkeftina lojîstîka e-bazirganî û otomasyona depokirinê tevbigere.
Ya duyemîn, di mekanîzmaya rêwîtiyê ya gerîdeya aqilmend HEGERLS de, şaxên girêdanê yên çerxên ajotinê û çerxên pasîf bi çîçek têne peyda kirin, û beşên girêdanê yên hêlînê bi celebek nû ya zengila xwerû ya elastîk ve têne girêdan, û bandora pozîsyona aksî ya girêdanê fam dike. şafts; Bi karanîna zengila radestê elastîk ji bo bidestxistina bandora pozîsyona eksê, karbidestiya hilberînê dikare zêde bibe û lêçûn were xilas kirin.
Sêyem: Otomobîla gerokê ya aqilmend Higelis HEGERLS ji bo hilgirtina hilanînê pê dihese ku çerxa ajotinê û çerxa pasîf her gav li ser riya rast dimeşin bêyî ku ji rêçê bi strukturê çerxa rêberiya dualî veqetin. Ev avahiya pozîsyonê aramtir û pêbawertir e.
Ya çaremîn, strukturên dirêjkirina forkê ya duyemîn ku ji hêla gerîdeya aqilmend HEGERLS ve hatî pejirandin dikare dûrahiya dirêjkirina forkê dûrtir bike û li cihên cihêreng selikan bistîne; Di heman demê de, prensîba mekanîzmaya dirêjkirina forkê ya duyemîn hêsan e, û lêçûna sêwirandin û çêkirinê kêm e; Parçeya veguheztinê moda yek motorê + kêmker + mîlê veguheztinê dipejirîne da ku mekanîzmaya dirêjkirina forca duyemîn bigihîje armanca berfirehbûn û girêbesta hevdem, ku lêçûnên bêtir xilas dike, bi bandor cîhê sêwirana hewce kêm dike, û giraniya gerîdeya gerokê kêm dike. .
Ya pêncemîn, gerîdeya aqilmend Higelis HEGERLS celebek nû ya cîhaza tîrêjê ya tîrêjê qebûl dike, ku dikare zû kembera hevdemî teng bike û xebata normal a gerîdeya gerokê bizane. Digel vê yekê, ev cîhaza tîrêjê ya tîrêjê hêsan e ku tête çêkirin, ji bo sazkirinê hêsan e û zû dikare were sererast kirin, ku lêçûn xilas dike, cîhê xilas dike û karbidestiya xebatê baştir dike.
Dema şandinê: Dec-19-2022