


Bi pêşkeftina pîşesaziya e-bazirganiyê re, bazar bilez belavkirin û lojîstîkê hewce dike. Di heman demê de, bilindbûna bihayê kedê dike ku nirxa pergala "ji bo mirovan" ji nû ve were nirxandin. Sûk gav bi gav dibîne ku pergala "mal ji mirovan re" dikare zexta embar û lojîstîkê kêm bike. Heya nuha, di pêvajoya otomasyona depokirinê de guhertinên nû hene: ji depokirina destan a kevneşopî bigire heya depokirina mekanîzekirî bi karanîna kemberên veguhêz, wesayîtên veguheztinê, hwd., heya depokirina otomatîkî ya yekbûyî. Naha, serîlêdana îstîxbarata sûnî û algorîtmayan bi fermî ketiye qonaxek nû ya otomosyona depokirinê. Hercules hegerls baş pê dizane ku avakirina depoya otomatîkî pêdivî bi yekbûna cûrbecûr amûr û teknolojiyên lojîstîkî heye. Di van demên dawî de, pergala kubao ya ku ji hêla hegerls ve hatî pêşve xistin fonksiyona pêvekêşana bêkêmasî ji veguheztinê heya hilanînê bigire heya cûrbecûr di senaryoya depokirinê de nîşan dide. Di heman demê de, hevkariya bêkêmasî ya di navbera pergala kubao û milê robot de jî dikare şiyana entegrasyona hilanînê ya pergala kubao diyartir bike. Ji ber vê yekê manipulatorek hilanînê ya bêmirov bi tevahî otomatîk çi ye? Di depokirina kelûpelan de pozîsyoneke çawa ya serdest digire? 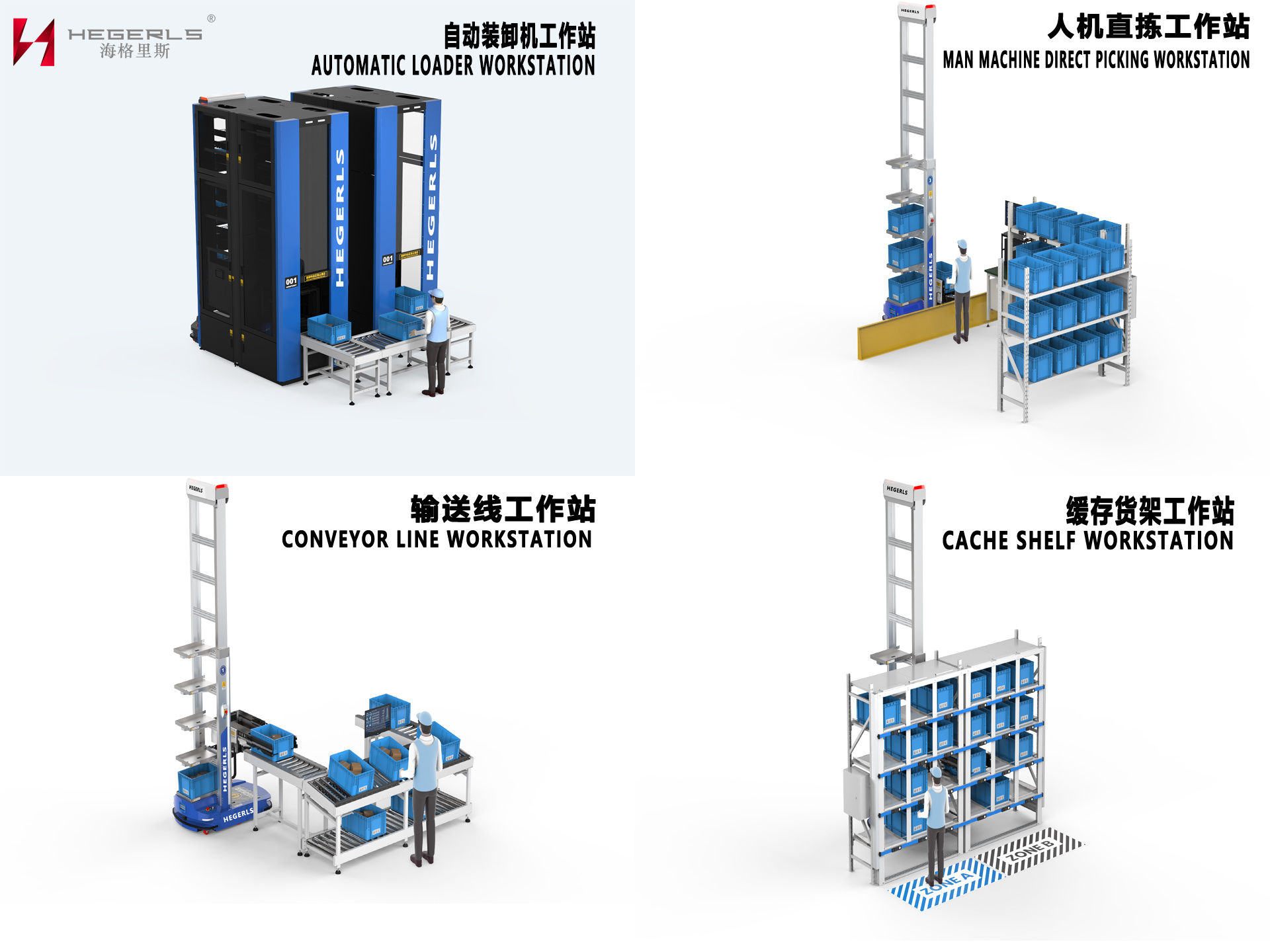 Hercules Hegels di nav xalên êşê yên bikarhêneran de kûr kolandiye, hewcedariyên nû yên sûkê fêm kiriye, û bi domdarî çareseriyên nûjen ên ku ji bo senaryoyên cihêreng maqûl in pêşve xistine. Di warê danûstendina mirov-komputerê de, hagerls xwedan têgihîştina xweya yekta ye, û gelek şêwaz û nexşeyên danûstendina mirov-komputerê sêwirandiye, di nav de rawestgeha xebatê ya barkerê otomatîk, rawestgeha xebatê ya rasterast a mirov-komputerê, îstgeha xebatê ya xeta veguheztinê, rawestgeha kar a refika cache, û rawestgeha xebatê manipulator. . Dabeşkirina taybetî wiha ye: Pêşîn, stasyona xebatê ya hilgirtina rasterast a mirov-makîne Di qereqola xebatê ya rasterast a mirov-makîneyê de, operator dikare rasterast li ser selika makîneyê birêkûpêk bike, û veqetandin tenê bi mîhengkirina qereqolek û çekek şopandinê dikare were qedandin. Ya duyemîn, qereqola xebatê ya xeta veguhestinê Robot bi xeta veguhêz ve girêdide. Robot qutiya maddeyên li ser selikê li ser xeta veguhêz datîne û xeta veguhêz jî qutiya maddî ji kesên li pêşberî wan re dişîne. Mirov rasterast di qutiya materyalê de hildibijêre, ku ev rehetiya hilgirtina operatorê pir çêtir dike û ji pirsgirêkên ewlehiyê dûr dikeve. Sêyemîn, qereqola kar a refika cache Robot qutiya materyalê datîne ser refika cache, û mirov li ser refê hildibijêrin. Robot têne berdan û diçin, karbidestiyê azad dikin. Çaremîn, qereqola xebatê ya barkerê otomatîk Ji bo ku bi tevahî lîstina hevrêziya karbidestiya mirov-komputerê bide, haggis hegerls makîneya barkirin û barkirinê ya otomatîkî îcad kir, ku careke din riya eşyayan berbi têkiliya mirovan vekir. Bi taybetmendiyên hilgirtina pir konteynirê yên bikêrhatî yên kubao re, wê barkirin û barkirina gelek konteyneran fêm kir, û karbidestiya hilanîn û hilanînê pir çêtir kir. Makîneya barkirin û barkirinê ya otomatîkî bi taybetî ji bo pergala robotê hilanîna sindoqê hatî sêwirandin, moda danûstendinê ya di navbera mal û mirovan de bêtir nûve dike, celebên stasyonên kar ên di pergala depoyê de dewlemend dike, û kargêriya karûbarên depoyê baştir dike.
Hercules Hegels di nav xalên êşê yên bikarhêneran de kûr kolandiye, hewcedariyên nû yên sûkê fêm kiriye, û bi domdarî çareseriyên nûjen ên ku ji bo senaryoyên cihêreng maqûl in pêşve xistine. Di warê danûstendina mirov-komputerê de, hagerls xwedan têgihîştina xweya yekta ye, û gelek şêwaz û nexşeyên danûstendina mirov-komputerê sêwirandiye, di nav de rawestgeha xebatê ya barkerê otomatîk, rawestgeha xebatê ya rasterast a mirov-komputerê, îstgeha xebatê ya xeta veguheztinê, rawestgeha kar a refika cache, û rawestgeha xebatê manipulator. . Dabeşkirina taybetî wiha ye: Pêşîn, stasyona xebatê ya hilgirtina rasterast a mirov-makîne Di qereqola xebatê ya rasterast a mirov-makîneyê de, operator dikare rasterast li ser selika makîneyê birêkûpêk bike, û veqetandin tenê bi mîhengkirina qereqolek û çekek şopandinê dikare were qedandin. Ya duyemîn, qereqola xebatê ya xeta veguhestinê Robot bi xeta veguhêz ve girêdide. Robot qutiya maddeyên li ser selikê li ser xeta veguhêz datîne û xeta veguhêz jî qutiya maddî ji kesên li pêşberî wan re dişîne. Mirov rasterast di qutiya materyalê de hildibijêre, ku ev rehetiya hilgirtina operatorê pir çêtir dike û ji pirsgirêkên ewlehiyê dûr dikeve. Sêyemîn, qereqola kar a refika cache Robot qutiya materyalê datîne ser refika cache, û mirov li ser refê hildibijêrin. Robot têne berdan û diçin, karbidestiyê azad dikin. Çaremîn, qereqola xebatê ya barkerê otomatîk Ji bo ku bi tevahî lîstina hevrêziya karbidestiya mirov-komputerê bide, haggis hegerls makîneya barkirin û barkirinê ya otomatîkî îcad kir, ku careke din riya eşyayan berbi têkiliya mirovan vekir. Bi taybetmendiyên hilgirtina pir konteynirê yên bikêrhatî yên kubao re, wê barkirin û barkirina gelek konteyneran fêm kir, û karbidestiya hilanîn û hilanînê pir çêtir kir. Makîneya barkirin û barkirinê ya otomatîkî bi taybetî ji bo pergala robotê hilanîna sindoqê hatî sêwirandin, moda danûstendinê ya di navbera mal û mirovan de bêtir nûve dike, celebên stasyonên kar ên di pergala depoyê de dewlemend dike, û kargêriya karûbarên depoyê baştir dike.

Di qonaxa paşîn de, hegerls di heman demê de manîpulatorê hegerls jî pêş xist, ango manîpulatorê hilanînê ya bêmirov bi tevahî otomatîk, ku bi piranî ji hêla manipulatorê ve li şûna destan, girêdana bi stasyona xebatê ya xeta veguhêz an stasyona xebatê ya barkerê otomatîkî ve tê fêm kirin. Xeta veguheztinê an makîneya barkirin û barkirinê ya otomatîkî bi robotên rêza kubao ve girêdayî ye ku bixweber qutiyên materyalê yên nebarkirî an qutiyên materyalê yên ku divê werin barkirin veguhezîne. Destê mekanîkî li şûna karkeran diguhezîne da ku eşyayan rêz bikin, û pêvajoya depokirina bêmirov a tam-otomatîkî fam dike. Ew avantajên otomasyona aqilmend, lêçûna kedê ya sifir, depokirin û barkirina bikêr heye. Kubao di qada rezervan de hilanîn û hilgirtina aqilmend nas dike, zendê mekanîkî girêdide, rêzkirina biaqil a tiştên piçûk ji hêla milê mekanîkî ve, û pêvajoya radestkirin û hilanîn ji hêla xeta veguhêz ve tê qedandin. Pêvajoya cûrbecûr ya platforma xebata destan ji holê radibe, û tevahiya pêvajoya operasyona bêpîlot ji cûrbecûr senaryoyên serîlêdanê re, di nav de hatina tiştan û çêkirina hilberînê, tê sepandin. Senaryoya sepandî: ew bi taybetî ji bo senaryoya hilgirtina tiştên firotgeha supermarketê re têkildar e.


Taybetmendiyên fonksiyonel ên hagerls stasyona xebatê ya manipulatorê hilanînê ya bêmirov bi tevahî otomatîk Kedê azad bikin - depokirina bi tevahî otomatîk û bêmirov pêk bînin, karkeran biguhezînin da ku tiştan rêz bikin, û depokirin û depokirina bi tevahî otomatîk bicîh bînin; Dabeşkirina hişmend - pergala platforma rêveberiya hişmend a haiq bi pergala kontrolkirina tevgera manîpulatorê re bêkêmasî ve girêdayî ye, û rasterast talîmatan dişîne da ku rêberiya manîpulator bike da ku tiştan rêz bike; Girêdana maqûl - girêdana bi robotên kubao, xetên veguhêz, refikên cache an makîneyên barkirin û barkirinê yên otomatîkî ku hewcedariyên senaryoyên karsaziyê yên cihêreng bicîh bînin; Ambarkirin û derketina bikêr - her robot 25-35 qutiyên / saet +25-35 qutiyan di / saetê de hildigire, û karbidestiya embar û derketinê dikare bigihîje heya 300 qutiyan / demjimêr.


Hagerls balê dikişîne ser R & D û sêwirana pergala robota barkirina aqilmend, û ji bo kêmkirina lêçûn û zêdekirina karîgeriyê ji bo xerîdaran bi riya teknolojiya robot û algorîtmaya îstîxbarata sûnî, pêgir e, da ku pergalek depokirina aqilmend a bikêr, biaqil û maqûl biafirîne. Naskirina sûk û xerîdaran dê bibe hêza ajotinê ya pêşveçûna berdewam a Hegels. Hagerls dê bi kûrahî bi nûbûn û R & D ve mijûl bibe, balê dikişîne ser R & D û sêwirana pergala robota hilanînê ya hişmend. Di heman demê de, ew ê cûrbecûr senaryoyên serîlêdanê pêşve bibe da ku xalên êşa hilanîna xerîdaran çareser bike û hewcedariyên hilanînê yên xerîdar bicîh bîne. Robot û teknolojiya îstîxbarata sûnî dest bi serdemek zêrîn a pêşkeftinê dikin, digel derfet û dijwariyan. Di pêşerojê de, hagerls dê pabendî nûbûn û pêşkeftinên teknolojîk bin, balê bikişînin ser dabeşkirina robotên hilanînê yên qutiyê, û hêdî hêdî matrixa hilber û fonksiyonê li ser bingeha xalên êşa hilanîna xerîdar xweştir bikin, da ku hîn bêtir rê li pêşkeftin û pêşkeftina dabeşkirinê bigire. ava.
Dema şandinê: Tîrmeh-08-2022